Bruce Lee random walk
Julia编程(三): 高性能计算
本文是Julia编程系列的第三篇文章,着重讲述它在高性能计算方面的应用。
1 引言
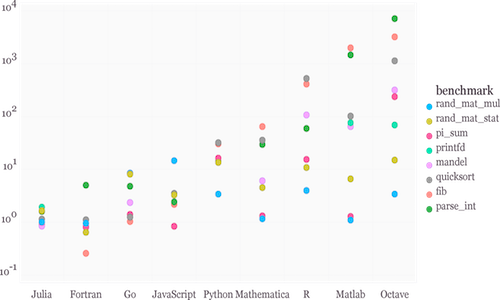
2 语言分析1
2.1 Profiling
Julia中自带Profile包,实现了所谓的采样(sampling)或统计分析(statistical profiler)。在任务执行期间,它通过周期性地回溯(backtrace)来工作。每次回溯捕获当前运行的函数和行号,以及导致这行的完整函数调用链,因此这是当前执行状态的一个快照。一个统计分析软件并不提供完整的逐行覆盖,因为回溯是在一定时间段发生的,默认情况下,Unix系统为1ms,Windows系统为10ms。并且采样是在所有执行点的一个稀疏子集上进行的,因此这样的数据具有一定的统计噪声。
function myfunc()
A = rand(100, 100, 200)
maximum(A) # expensive
end
@profile myfunc()
Profile.print()
@profile (for i = 1:100; myfunc(); end)
Profile.print() # default "tree" dump
Profile.print(format=:flat)
代码中存在递归
dumbsum(n::Integer) = n == 1 ? 1 : 1 + dumbsum(n-1)
dumbsum3() = dumbsum(3)
@profile dumbsum3()
Profile.print()
累积(accumulation)&清除
@profile产生的结果都累积在一个缓冲区中,如果在@profile下运行多个代码块,那么Profile.print()将显示组合结果。我们可以调用Profile.clear()刷新缓冲区。
print参量说明
function print(io::IO = STDOUT, data = fetch(); format = :tree, C = false, combine = true, cols = tty, maxdepth, sortedby = :count, noisefloor, mincount)
data = copy(Profile.fetch())
Profile.clear()
@profile Profile.print(STDOUT, data) # Prints the previous results
Profile.print() # Prints results from Profile.print()
s = open("/tmp/prof.txt","w")
Profile.print(s, cols = 500)
close(s)
配置
Profile.init() # returns the current settings
Profile.init(n, delay) #default n = 10^6, delay = 0.001
Profile.init(delay = 0.01)
2.2 内存分配分析
减少内存分配是一种最常见的提升性能的技术。分配总数可以通过@time和@allocated来估量,特定的触发分配的行可以通过Profiling中由这些行引起的垃圾回收(garbage collection)代价推理出来。当然这也可以直接通过代码每一行分配的内存量测量出来。
$ julia --track-allocation=<setting>
这里的<setting>选项包括none, user和all。
当退出Julia时,结果被写入相同目录下的.mem文件中。Coverage包包含一些基本分析工具,如按分配字节数的顺序将行进行排序。
2.3 Stack Traces
stacktrace()
example() = stacktrace()
example()
@noinline child() = stacktrace()
@noinline myparent() = child() # avoid Base.parent
grandparent() = myparent()
grandparent()
信息抽取
top_frame = stacktrace()[1]
top_frame.func
top_frame.file
top_frame.line
top_frame.linfo
top_frame.inlined
top_frame.from_c
top_frame.pointer
错误处理
@noinline bad_function() = undeclared_variable
@noinline example() = try
bad_function()
catch
stacktrace()
end
example()
@noinline example() = try
bad_function()
catch
catch_stacktrace()
end
example()
@noinline child() = error("Whoops!")
@noinline myparent() = child()
@noinline function grandparent()
try
myparent()
catch err
println("ERROR: ", err.msg)
catch_stacktrace()
end
end
grandparent()
比较
- backtrace()返回Ptr{Void}向量
trace = backtrace()
stacktrace(trace)
- 默认情况下,stacktrace()从stack栈中移除了低级C函数
stacktrace(trace, true)
pointer = backtrace()[1]
frame = StackTraces.lookup(pointer)
println("The top frame is from $(frame[1].func)!")
2.4 性能提升的技巧
避免全局变量
- 任何性能攸关或作为基准的代码都应该放置在函数中
-
置为常量
const DEFAULT_VAL = 0 -
声明类型
global x y = f(x::Int + 1) - REPL中的所有代码都处于全局作用域
用@time评估性能&关注内存分配
@time不同于tic()toc()函数,它除了输出花费时间外还输出占用内存。
function f(n)
s=0
for i = 1:n
s += i/2
end
s
end
@time f(1)
@time f(10^6)
工具
关于第三方包更具体的使用,请看下面第二部分。
- Profiling
- ProfileView包:用于复杂项目
- @code_warntype
- Lint包
- TypeCheck包
避免带抽象类型参量的容器
a = Real[] # typeof(a) = Array{Real,1}
if (f = rand()) < .8
push!(a, f)
end
因为a是Real抽象类型的数组,所以它必须要能够承载任意Real值。Real对象是任意大小和任意结构的,所以a必须表示成指向单独分配的Real对象的指针数组。因为f是Float64类型的,所以a = Float64[]更好。
这将创建可以高效操纵的64位浮点数值的连续块,这在系列文章的第一篇入门中也经常提到。
类型声明
避免抽象类型的域
struct MyAmbiguousType
a
end
b = MyAmbiguousType("Hello")
c = MyAmbiguousType(17)
typeof(b)
typeof(c)
编译器使用对象类型而不是值来确定如何构建代码,但是从对象中编译器并不能推出有用信息。下面的b和c具有相同类型,但是它们在内存中的基本数据表示是有很大不同的。即使你在域a中存储数值,UIint8和Float64类型的数值在内存中的表示仍然不同,因此CPU需要使用两种不同的指令来处理它们。因为所需信息在下面的类型中不能获知,因此这样的决策需要在运行时进行。
mutable struct MyType{T<:AbstractFloat}
a::T
end
m = MyType(3.2)
typeof(m)
m.a = 4.5f0
typeof(m.a) # not change
func(m::MyType) = m.a + 1
code_llvm(func,(MyType{Float64},))
code_llvm(func,(MyType{AbstractFloat},))
code_llvm(func, (MyType, ))
避免抽象容器的域
mutable struct MySimpleContainer{A<:AbstractVector}
a::A
end
c = MySimpleContainer(1:3)
typeof(c)
c = MySimpleContainer([1:3;])
typeof(c)
对于a的不同类型,定义不同函数
function sumfoo(c::MySimpleContainer)
s=0
for x in c.a
s += foo(x)
end
s
end
foo(x::Integer) = x
foo(x::AbstractFloat) = round(x)
function myfun{T<:AbstractFloat}(c::MySimpleContainer{Vector{T}})
...
end
function myfun{T<:Integer}(c::MySimpleContainer{Vector{T}})
...
end
对于UnitRange{T}或其它抽象类型又需要重新定义,这样非常单调乏味。
mutable struct MyContainer{T, A<:AbstractVector}
a::A
end
MyContainer(v::AbstractVector) = MyContainer{eltype(v), typeof(v)}(v)
b = MyContainer(1.3:5)
typeof(b)
function myfunc{T<:Integer, A<:AbstractArray}(c::MyContainer{T, A})
return c.a[1] + 1
end
# Note: because we can only define MyContainer for
# A<:AbstractArray, and any unspecified parameters are arbitrary,
# the previous could have been written more succinctly as
# function myfunc{T<:Integer}(c::MyContainer{T})
function myfunc{T<:AbstractFloat}(c::MyContainer{T})
return c.a[1] + 2
end
function myfunc{T<:Integer}(c::MyContainer{T,Vector{T}})
return c.a[1] + 3
end
myfunc(MyContainer(1:3))
myfunc(MyContainer(1.0:3))
myfunc(MyContainer([1:3]))
但是很明显,上面我们并没有约束A的元素类型为T,下面我们用内部构造器进行修改
mutable struct MyBetterContainer{T<:Real, A<:AbstractVector}
a::A
MyBetterContainer{T, A}(v::AbstractVector{T}) where {T, A} = new(v)
end
MyBetterContainer(v::AbstractVector) = MyBetterContainer{eltype(v),typeof(v)}(v)
b = MyBetterContainer(1.3:5)
typeof(b)
声明取自无类型位置处的值
作出这样的声明对于性能提升具有很多好处,如果值不是期望类型,将抛出一个运行时错误
function foo(a::Array{Any,1})
x = a[1]::Int32
b = x+1
...
end
声明关键字参量的类型
关键字声明不会影响函数内代码的性能。但是它们却可以减少包含关键字参量的函数调用的负载,因为对于调用站(call site)而言,带关键字参量的函数负载几乎为零,调用站只传递基于位置的参量。
尽量避免在性能攸关的代码中使用关键字参量列表,因为形如f(x; keywords...)的关键字动态列表的传递是很慢很慢的
function with_keyword(x; name::Int = 1)
...
end
将函数拆成多个定义
这使得编译器能够直接调用那些最适用的代码,甚至可以内连(inline)
function norm(A)
if isa(A, Vector)
return sqrt(real(dot(A,A)))
elseif isa(A, Matrix)
return max(svd(A)[2])
else
error("norm: invalid argument")
end
end
norm(x::Vector) = sqrt(real(dot(x,x)))
norm(A::Matrix) = max(svd(A)[2])
写类型稳定的函数
pos(x) = x < 0 ? zero(x) : x # or use oftype(x, 0)
避免改变变量类型
function foo()
x = 1
for i = 1:10
x = x/bar()
end
return x
end
上面x = 1x为整型,在循环中,x变成浮点型,下面有几种修改方法
x = 1.0
x :: Float64 = 1
x = one(T)
核心计算独立
正如下面代码所示,如果不将核心计算部分独立出来,由于数组是随机产生的,编译器并不知道a的类型,而下面的代码中对于a的不同类型,内部循环被重新编译成fill_two!的一部分,并且这样的代码风格更适合代码重用。
function fill_twos!(a)
for i=1:length(a)
a[i] = 2
end
end
function strange_twos(n)
a = Array(rand(Bool) ? Int64 : Float64, n)
fill_twos!(a)
return a
end
值作参量的类型
编译器很容易明白A的类型Array{Float64, 2},因为它知道填充值为浮点数,维数为NTuple{2, Int}
A = fill(5.0, (3, 3))
但是类型推理并不能提前预测整型值,因此可以通过Val传递。但是这种方式比较微妙,对它的无用甚至会造成更差的性能
function array3{N}(fillval, ::Type{Val{N}})
fill(fillval, ntuple(d->3, Val{N}))
end
function filter3{T, N}(A::AbstractArray{T, N})
kernel = array3(1, Val{N})
filter(A, kernel)
end
避免对多指派甚至在值作参量的类型上的多指派的滥用
按列优先的顺序访问数组
- column-major ordering: Fortran, Matlab, R, Julia
- row-major ordering: C, Python(numpy)
x = [1 2; 3 4]
x[:]
vec(x)
预分配输出空间
function xinc!{T}(ret::AbstractVector{T}, x::T)
ret[1] = x
ret[2] = x+1
ret[3] = x+2
nothing
end
function loopinc_prealloc()
ret = Array{Int}(3)
y=0
for i = 1:10^7
xinc!(ret, i)
y += ret[2]
end
y
end
@time loopinc_prealloc()
避免在I/O中引入字符串插值
println(file, "$a $b") # bad
println(file, a, " ", b)
在并行执行期间优化网络I/O
responses = Vector{Any}(nworkers())
@sync begin
for (idx, pid) in enumerate(workers())
@async responses[idx] = remotecall_fetch(pid, foo, args...)
end
end
微调(tweaks)
- 避免不必要的数组使用: x + y + z 好于 sum([x, y, z])
- 复数z模平方:abs2(z) 好于 abs(z) ^ 2
- 截断除法: div(x, y) 好于 trunc(x / y)
- 向下舍入除法: fld(x, y) 好于 floor(x / y)
- 向上舍入除法: cld(x, y) 好于 ceil(x / y)
更多声明
- @inbounds
- @fastmath
- @simd: 这仍处于实验阶段
function inner( x, y )
s = zero(eltype(x))
for i=1:length(x)
@inbounds s += x[i]*y[i]
end
s
end
function innersimd( x, y )
s = zero(eltype(x))
@simd for i=1:length(x)
@inbounds s += x[i]*y[i]
end
s
end
function timeit( n, reps )
x = rand(Float32,n)
y = rand(Float32,n)
s = zero(Float64)
time = @elapsed for j in 1:reps
s+=inner(x,y)
end
println("GFlop = ",2.0*n*reps/time*1E-9)
time = @elapsed for j in 1:reps
s+=innersimd(x,y)
end
println("GFlop (SIMD) = ",2.0*n*reps/time*1E-9)
end
timeit(1000,1000)
下面是有限差分程序:
function init!(u)
n = length(u)
dx = 1.0 / (n-1)
@fastmath @inbounds @simd for i in 1:n
u[i] = sin(2pi*dx*i)
end
end
function deriv!(u, du)
n = length(u)
dx = 1.0 / (n-1)
@fastmath @inbounds du[1] = (u[2] - u[1]) / dx
@fastmath @inbounds @simd for i in 2:n-1
du[i] = (u[i+1] - u[i-1]) / (2*dx)
end
@fastmath @inbounds du[n] = (u[n] - u[n-1]) / dx
end
function norm(u)
n = length(u)
T = eltype(u)
s = zero(T)
@fastmath @inbounds @simd for i in 1:n
s += u[i]^2
end
@fastmath @inbounds return sqrt(s/n)
end
function main()
n = 2000
u = Array{Float64}(n)
init!(u)
du = similar(u)
deriv!(u, du)
nu = norm(du)
@time for i in 1:10^6
deriv!(u, du)
nu = norm(du)
end
println(nu)
end
main()
;julia wave.jl
;julia --math-mode=ieee wave.jl # disable @fastmath
我们可以使用code_native()函数来查看生成代码中的改变
将异常值(subnormal numbers)视为零
需要小心使用
- set_zero_subnormals(true)
function timestep{T}( b::Vector{T}, a::Vector{T}, Δt::T )
@assert length(a)==length(b)
n = length(b)
b[1] = 1 # Boundary condition
for i=2:n-1
b[i] = a[i] + (a[i-1] - T(2)*a[i] + a[i+1]) * Δt
end
b[n] = 0 # Boundary condition
end
function heatflow{T}( a::Vector{T}, nstep::Integer )
b = similar(a)
for t=1:div(nstep,2)
timestep(b,a,T(0.1))
timestep(a,b,T(0.1))
end
end
heatflow(zeros(Float32,10),2) # Force compilation
for trial=1:6
a = zeros(Float32,1000)
set_zero_subnormals(iseven(trial)) # Odd trials use strict IEEE arithmetic
@time heatflow(a,1000)
end
@code_warntype
- code_warntype()
- @code_lowered
- @code_typed
- @code_llvm
- @code_native
pos(x) = x < 0 ? 0 : x
function f(x)
y = pos(x)
sin(y * x + 1)
end
@code_warntype f(3.2)
3 第三方包的使用
High Performance Computing2