Bruce Lee random walk
Julia编程(六): 深度学习
本文是Julia编程系列的第六篇文章深度学习方面的应用。
1 引言
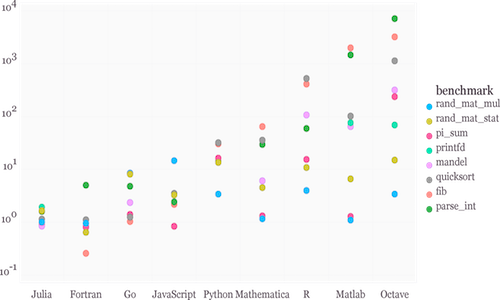
深度学习=大数据+超强计算力
这两个缺一不可。神经网络从上世纪80-90年代开始急速发展,但是由于数据量和计算力的不足,导致在实际生活中应用很少,以至于神经网络从2000到2010年沉寂了近10年。从2009年开始神经网络开始应用于语音识别、计算机视觉等领域,神经网络又开始流行了。神经网络还是那个神经网络,复苏的主要驱动力就是数据量和计算力。
A very rought sketch:
- 50s/60s: Biologically inspired computation, the perceptron
- 70s: Decline after “Perceptrons” (1969)
- 80s: Connectionism and backpropagation
- 90s: Convolutional networks, but limited depth
- 00s: Margin-based model dominance
- 10s: Deep Learning
2 机器配置
- Best GPU overall (by a small margin): Titan Xp
- Cost efficient but expensive: GTX 1080 Ti, GTX 1070, GTX 1080
- Cost efficient and cheap: GTX 1060 (6GB)
- I work with data sets > 250GB: GTX Titan X (Maxwell), NVIDIA Titan X Pascal, or NVIDIA Titan Xp
- I have little money: GTX 1060 (6GB)
- I have almost no money: GTX 1050 Ti (4GB)
- I am a researcher: GTX 1080 Ti. In some cases, like natural language processing, a GTX 1070 or GTX 1080 might also be a solid choice — check the memory requirements of your current models
- I started deep learning and I am serious about it: Start with a GTX 1060 (6GB). Depending of what area you choose next (startup, Kaggle, research, applied deep learning) sell your GTX 1060 and buy something more appropriate
- I want to try deep learning, but I am not serious about it: GTX 1050 Ti (4 or 2GB)
3 常见框架
- Mocha.jl
- MXNet.jl
- TensorFlow.jl:封装了TensorFLow
- Flux.jl ⭐️
- Knet.jl ⭐️
- DataFlow.jl ⭐️
4 Neural Networks
4.1 A simplified Neural Network
y = f(Xw) where f is the activation function, e.g., sigmoid function f(z) = 1/(1 + exp(-z)), f_deriv(a) = a*(1-a).
e.g., X=[0 0 1;0 1 1;1 0 1;1 1 1]
y = [0,0,1,1]’
3 inputs, 1 hidden layer, 1 output
pseudo code:
seed(1)
w = 2 * rand(3,1) -1
forloop
l0 = X # 0th layer, that is input
l1 = f(l0 * w) # 1th layer, that is hidden
l1_error = y - l1
l1_delta = l1_error * f_deriv(l1)
w += l0’ * l1_delta
end
3 inputs, 2 hidden layer, 1 output
pseudo code:
seed(1)
w1 = 2 * rand(3,4) -1
w2 = 2 * rand(4,1) -1
forloop
l0 = X # 0th layer, that is input
l1 = f(l0 * w1) # 1th hidden layer
l2 = f(l1 * w2) # 2th hidden layer
l2_error = y - l2
l2_delta = l2_error * f_deriv(l2)
l1_error = l2_delta * w2
l1_delta = l1_error * f_deriv(l1)
w2 += l1’ * l2_delta
w1 += l0’ * l1_delta
end
4.2 using BackpropNeuralNet
2 inputs, 1 layer with 3 neurons, 2 outputs
- net=init_network([2,3,2])
inputs-outputs
- train(net,[0.15,0.7],[0.1,0.9])
evaluate outputs
- net_eval(net,[0.15,0.7])
4.3 using ANN
n_hidden_units = 20
ann = ArtificialNeuralNetwork(n_hidden_units)
n_obs = 150
n_feats = 80
X = rand(Float64, n_obs, n_feats)
y = rand(Int64, n_obs)
fit!(ann, X, y)
n_new_obs = 60
X_new = rand(Float64, n_new_obs, n_feats)
y_pred = predict(ann, X_new)
4.4 Mathematica program
# SLP
# linear transformation by a matrix of specified dimension
# or net = NetChain[{5}]
net = NetChain[{LinearLayer[5]}]
# activation function
# or net = NetChain[{Ramp}]
# or ConvolutionLayer[]
# or LongShortTermMemoryLayer[]
net = NetChain[{ElementwiseLayer[Ramp]}]
net = NetChain[{ElementwiseLayer[Tanh]}]
net = NetChain[{ElementwiseLayer[LogisticSigmoid]}]
# initialize with some random weights and bias
net = NetInitialize[net]
4.5 MLP
# data acquisition
resource = ResourceObject["MNIST"];
data = ResourceData[resource, "TrainingData"];
sample = RandomSample[data, 100];
# establishing NN
net = NetChain[{ConvolutionLayer[20, 5], Ramp, PoolingLayer[2, 2],
ConvolutionLayer[50, 5], Ramp, PoolingLayer[2, 2],
FlattenLayer[], 500, Ramp, 10, SoftmaxLayer[]}];
# training NN
net = NetTrain[net, sample];
## relatively small sample
Table[{net[sample[[i, 1]]], sample[[i, 1]]}, {i, 1, 100}]
# classifying and predicting
Classify[]
Predict[]
5 应用
5.1 手写数字识别
using Mocha
srand(12345678)
data_layer = AsyncHDF5DataLayer(name="train-data", source="data/train.txt", batch_size=64, shuffle=true)
conv_layer = ConvolutionLayer(name="conv1", n_filter=20, kernel=(5,5), bottoms=[:data], tops=[:conv])
pool_layer = PoolingLayer(name="pool1", kernel=(2,2), stride=(2,2), bottoms=[:conv], tops=[:pool])
conv2_layer = ConvolutionLayer(name="conv2", n_filter=50, kernel=(5,5), bottoms=[:pool], tops=[:conv2])
pool2_layer = PoolingLayer(name="pool2", kernel=(2,2), stride=(2,2), bottoms=[:conv2], tops=[:pool2])
fc1_layer = InnerProductLayer(name="ip1", output_dim=500, neuron=Neurons.ReLU(), bottoms=[:pool2], tops=[:ip1])
fc2_layer = InnerProductLayer(name="ip2", output_dim=10, bottoms=[:ip1], tops=[:ip2])
loss_layer = SoftmaxLossLayer(name="loss", bottoms=[:ip2,:label])
backend = DefaultBackend()
init(backend)
common_layers = [conv_layer, pool_layer, conv2_layer, pool2_layer, fc1_layer, fc2_layer]
net = Net("MNIST-train", backend, [data_layer, common_layers..., loss_layer])
exp_dir = "snapshots-$(Mocha.default_backend_type)"
method = SGD()
params = make_solver_parameters(method, max_iter=10000, regu_coef=0.0005,
mom_policy=MomPolicy.Fixed(0.9),
lr_policy=LRPolicy.Inv(0.01, 0.0001, 0.75),
load_from=exp_dir)
solver = Solver(method, params)
setup_coffee_lounge(solver, save_into="$exp_dir/statistics.jld", every_n_iter=1000)
# report training progress every 100 iterations
add_coffee_break(solver, TrainingSummary(), every_n_iter=100)
# save snapshots every 5000 iterations
add_coffee_break(solver, Snapshot(exp_dir), every_n_iter=5000)
# show performance on test data every 1000 iterations
data_layer_test = HDF5DataLayer(name="test-data", source="data/test.txt", batch_size=100)
acc_layer = AccuracyLayer(name="test-accuracy", bottoms=[:ip2, :label])
test_net = Net("MNIST-test", backend, [data_layer_test, common_layers..., acc_layer])
add_coffee_break(solver, ValidationPerformance(test_net), every_n_iter=1000)
solve(solver, net)
#Profile.init(int(1e8), 0.001)
#@profile solve(solver, net)
#open("profile.txt", "w") do out
# Profile.print(out)
#end
destroy(net)
destroy(test_net)
shutdown(backend)
5.2 Character-level text generation with Flux(Char-RNN)
The model works at the character level, meaning that we’ll hand it a sequence of characters like “The qui” and it will predict c, followed by k, etc, figuring out that the most likely next word is “quick” – then it can go on to predict “brown”, “fox” and so on, letter by letter.
using Flux
@net f(x) = x .* x
# wrap f so that they will run on a backend
fmx = mxnet(f)
fmx([1,2,3])
# use MXNet to take gradients
Flux.back!(fmx, [1,1,1],[1,2,3])
using Flux: onehot, onecold
alphabet = 'a':'z'
onehot('c', alphabet)
onecold(rand(26), alphabet)
W = randn(26,26)
b = randn(26)
@net f(x) = tanh.(W*x + b)
onecold(f(onehot('F', alphabet)), alphabet)
A model like f(x) above – even a much more complex version – will always return the same output for the same input.
Sometimes we’d like this not to be true. For example, in our character-level model above, f(‘t’) predicts the character that comes after t. This clearly varies depending on what’s before ‘t’ – “lat” and “bit” are probably followed by different letters, like “later” and “bitten”.
So we want f to access some state from previous times it was called. We can do that with a neat syntax for indexing in time.
count behaves essentially the same as a global variable in this case. f is now able to store some aggregate information about all of the information we’ve seen (in this case just a count).
Unlike a global variable, Flux knows about y and can do some interesting things with it. For example, we can statically “unroll” f to take a sequence of inputs and outputs.
count = 0
@net function f(x)
count = count{-1} + 1
return x + count
end
fu = unroll1(f)
fu(0)
fu(0)
fu = unroll(f, 5)
fu((0,1,0,-1,0))
alphabet = ['a':'z'..., ' ']
N = length(alphabet)
Wxy = randn(N,N)
Wyy = randn(N,N)
b = randn(N)
y = randn(N)
@net function f(x)
y = tanh.(Wxy*x + Wyy*y{-1} + b)
end
fu = unroll1(f)
onecold(fu(onehot('F', alphabet)), alphabet)
s = ['a']
for i = 1:50
push!(s, onecold(fu(onehot(s[end], alphabet)), alphabet))
end
join(s)
join(rand(alphabet, 50))
using Flux.Batches: Batch, seqs, chunk
input = readstring("res/shakespeare_input.txt")
alphabet = unique(input)
N = length(alphabet)
first(input)
encode(input) = seqs((onehot(ch, alphabet) for ch in input), 50)
first(encode(input))
Xs = (Batch(ss) for ss in zip(encode.(chunk(input, 50))...))
Ys = (Batch(ss) for ss in zip(encode.(chunk(input[2:end], 50))...))
Flux.rawbatch(first(Xs))
# training
using Flux: unsqueeze
init(dims) = randn(dims)/100
@net type Recurrent
Wxy; Wyy; by
y
function (x)
y = tanh( x * Wxy .+ y{-1} * Wyy .+ by )
end
end
Recurrent(in, out) =
Recurrent(init((in, out)), init((out, out)), init((1, out)), init((1, out)))
f = unroll1(Recurrent(N,N))
onecold(f(rand(5,N)), alphabet)
model = Chain(
Recurrent(N, 256),
Recurrent(256, 256),
Affine(256, N),
softmax)
m = mxnet(unroll(model, 50))
m(first(Xs))
using Flux: logloss, tobatch
eval = tobatch.(first.(drop.((Xs, Ys), 5)))
evalcb = () -> @show logloss(m(eval[1]), eval[2])
evalcb()
@time Flux.train!(m, zip(Xs, Ys), η = 0.001, loss = logloss, cb = [evalcb])
using StatsBase: wsample
function sample(model, n, temp = 1)
s = [rand(alphabet)]
m = unroll1(model)
for i = 1:n-1
push!(s, wsample(alphabet, softmax(m(unsqueeze(onehot(s[end], alphabet)))./temp)[1,:]))
end
return string(s...)
end
sample(model[1:end-1], 100)
# LSTM
model = open(deserialize, "res/shakes.jls")
sample(model[1:end-1], 1000) |> println
@net type MyLSTM
Wxf; Wyf; bf
Wxi; Wyi; bi
Wxo; Wyo; bo
Wxc; Wyc; bc
y; state
function (x)
# Gates
forget = σ( x * Wxf .+ y{-1} * Wyf .+ bf )
input = σ( x * Wxi .+ y{-1} * Wyi .+ bi )
output = σ( x * Wxo .+ y{-1} * Wyo .+ bo )
# State update and output
state′ = tanh( x * Wxc .+ y{-1} * Wyc .+ bc )
state = forget .* state{-1} .+ input .* state′
y = output .* tanh(state)
end
end
MyLSTM(in, out) =
LSTM(vcat([[init((in, out)), init((out, out)), init((1, out))] for _ = 1:4]...)...,
zeros(Float32, (1, out)), zeros(Float32, (1, out)))